13-3 サーボモータの動作を理解する
Section outline
-
-
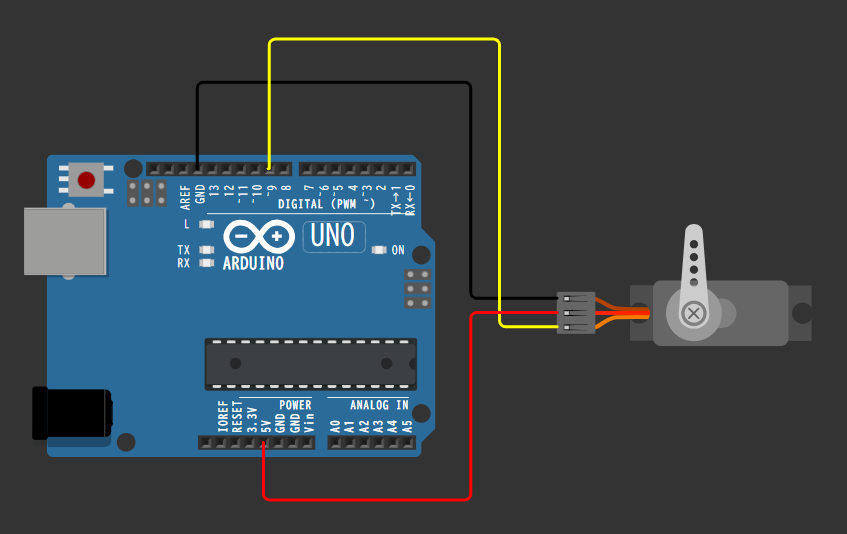
次のような回路を組みます。
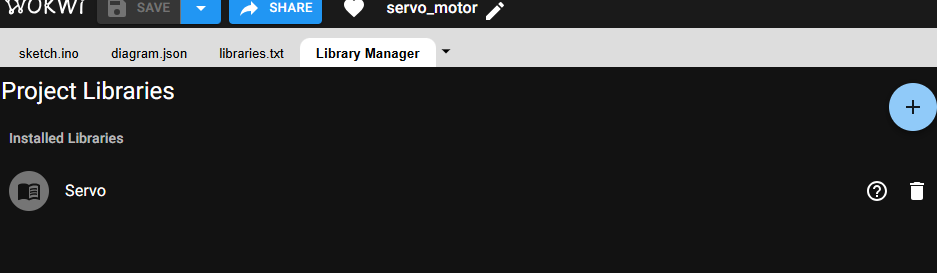
なお、次の図のようにLibrary Managerにおいて,servo_mortorを追加します。
 パルス幅で回転角を調整します。
パルス幅で回転角を調整します。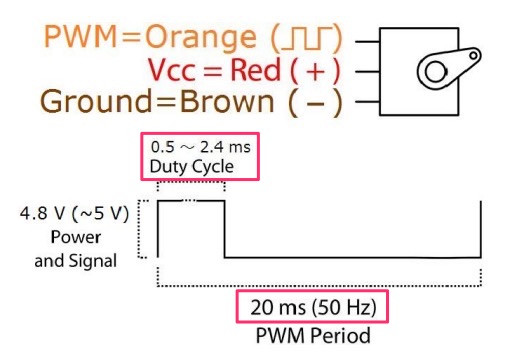 #include <Servo.h>
#include <Servo.h>
int SERVO_SOKET = 9; //ソケット番号の指定
Servo myServo; // サーボモータ制御用のオブジェクト
void setup() {myServo.attach(9); // サーボモーターをデジタルピン9に接続}
void loop(){myServo.write(0); // パルス幅0.5m秒delay(1000); // 1秒停止myServo.write(90); // パルス幅1.45m秒delay(1000);myServo.write(180); // パルス幅2.4m秒delay(1000);}
-